بهینهسازی عملکرد الکتروموتورها در سیستمهای صنعتی مدرن برای مهندسان، تکنسینها و متخصصان اتوماسیون صنعتی، مستلزم تنظیم دقیق پارامترهای درایو فرکانس متغیر (VFD) است. تنظیمات پیشفرض کارخانه به دلیل عدم انطباق با مشخصات الکتریکی و مکانیکی منحصر به فرد هر مجموعه موتور و بار، هرگز پاسخگوی نیازهای عملیاتی دقیق نخواهد بود. این راهنما از سایت شرکت آرمان بنیان اکسین به عنوان یک شرکت اتوماسیون صنعتی با تجربه تولید و واردات انواع محصولات این حوزه، به صورت تخصصی، مراحل کلیدی و ملاحظات فنی در پیکربندی اینورتر را تشریح مینماید.
مراحل و راهنمای تنظیم پارامترهای اینورتر
در ادامه به مهمترین مواردی که باید بررسی و تنطیم شوند میپردازیم:
دادههای اساسی موتور و مبانی پارامتری
اساس یک پیکربندی صحیح، ورود دقیق اطلاعات مندرج بر روی پلاک مشخصات موتور است. این دادهها مدل ریاضی داخلی اینورتر را برای کنترل بهینه موتور شکل میدهند.
| پارامتر فنی | نماد استاندارد | اهمیت در تنظیمات اینورتر |
|---|---|---|
| ولتاژ نامی | Rated Voltage (V) | تعیین سطح ولتاژ خروجی درایو برای تطابق با عایقبندی سیمپیچ موتور. |
| جریان نامی | Rated Current (A) | مبنای اصلی برای تنظیم حفاظت اضافهبار حرارتی الکترونیکی (I²t). |
| فرکانس نامی | Rated Frequency (Hz) | نقطه کار اصلی موتور که در آن به توان و سرعت نامی خود میرسد (معمولاً ۵۰ یا ۶۰ هرتز). |
| سرعت نامی | Rated Speed (RPM) | سرعت روتور در بار کامل که برای محاسبات لغزش (Slip) در مدهای کنترلی پیشرفته استفاده میشود. |
| توان نامی | Rated Power (kW/HP) | معرف توان مکانیکی خروجی موتور؛ برای انتخاب صحیح سایز اینورتر حیاتی است. |
تحلیل و انتخاب مد کنترلی (Control Mode)
انتخاب الگوریتم کنترل، تعیینکنندهترین پارامتر در کیفیت عملکرد دینامیکی سیستم است و باید متناسب با الزامات فرآیند انتخاب گردد. مدهای کنترلی اصلی به سه دسته تقسیم میشوند:
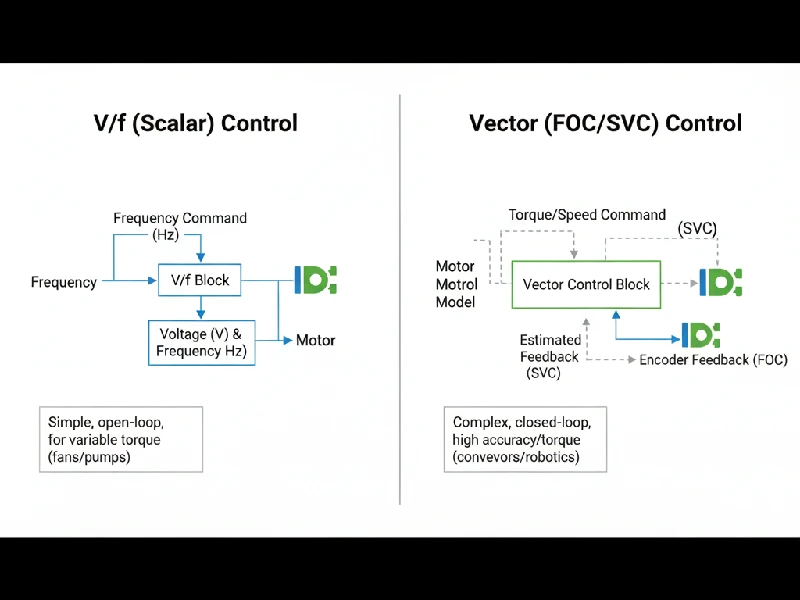
- کنترل اسکالر (V/f Control)، به عنوان پایهایترین مد، بر اساس حفظ نسبت ثابت ولتاژ به فرکانس عمل میکند. این روش برای کاربردهایی با گشتاور متغیر مانند پمپها و فنها که نیاز به پاسخ دینامیکی بالا ندارند، یک راهحل اقتصادی و کارآمد است.
- کنترل برداری بدون سنسور (Sensorless Vector Control – SVC)، سطح بالاتری از عملکرد را ارائه میدهد. این مد با استفاده از یک مدل ریاضی دقیق از موتور، شار و گشتاور را به صورت مستقل کنترل میکند و برای کاربردهایی نظیر نوار نقالهها، اکسترودرها و میکسرهای صنعتی ایدهآل است.
- کنترل برداری حلقه بسته (Field-Oriented Control – FOC)، بالاترین سطح دقت را با استفاده از فیدبک مستقیم از یک انکودر ارائه میدهد و برای کاربردهای بسیار حساس مانند ماشینآلات CNC و سیستمهای موقعیتیابی الزامی است.
تشریح پارامترهای عملیاتی مهم
پارامترهای عملیاتی زیر نقش کلیدی در تعریف رفتار دینامیکی درایو دارند.
- منبع فرمان و مرجع فرکانس (Command/Frequency Source) تعیین میکند که فرامین استارت/استاپ و سیگنال تنظیم سرعت از کدام منبع دریافت شوند: کیپد، ترمینالهای ورودی یا شبکه صنعتی.
- پارامتر مهم دیگر، زمانهای شتابگیری و توقف (Accel/Decel Times) است که شیب افزایش و کاهش سرعت را تعریف میکنند. تنظیم مقادیر بهینه، از بروز خطاهای اضافه جریان (Overcurrent) و اضافه ولتاژ (Overvoltage) جلوگیری میکند.
- علاوه بر این، محدودیتهای فرکانس (Frequency Limits) برای حفاظت از تجهیزات مکانیکی و تقویت گشتاور (Torque Boost) برای بهبود گشتاور راهاندازی، از جمله تنظیمات ضروری هستند. برای بارهای گشتاور متغیر (مانند فن)، انتخاب الگوی V/f توانی (Quadratic Pattern) منجر به بهینهسازی چشمگیر مصرف انرژی میشود.
ساختار پارامترها در برندهای مختلف
اگرچه مفاهیم پارامترها در تمامی درایوها یکسان است، اما ساختار منو و نامگذاری آنها بین برندهای مختلف تفاوت دارد. به عنوان مثال، برندهایی مانند LS و Delta معمولاً از یک ساختار گروهی استفاده میکنند. در مقابل، برندهای اروپایی نظیر Siemens و Schneider Electric اغلب ساختاری مبتنی بر شمارهگذاری ترتیبی و منوهای درختی دارند. اینورتر برند INVT نیز ساختار گروهی مشابهی را به کار میگیرد که در آن گروه P00 به پارامترهای پایه و P01 به پارامترهای موتور اختصاص دارد. آشنایی با این ساختارها، فرآیند راهاندازی را تسریع میبخشد.
تنظیمات اینورتر سه فاز
این پیکربندی، استاندارد اصلی در محیطهای صنعتی است که در آن، اینورتر با برق سه فاز (معمولاً 380V یا 400V) تغذیه شده و یک الکتروموتور سه فاز را کنترل میکند. تمامی مباحث پارامتری که تاکنون مطرح شد—از جمله ورود اطلاعات پلاک، انتخاب مدهای کنترلی پیشرفته (SVC/FVC) و تنظیمات حفاظتی—به طور کامل برای این مدل کاربرد دارند.
مهمترین بخش در تنظیمات، اطمینان از تطابق دقیق ولتاژ نامی موتور (که معمولاً 380V است) با پارامتر ولتاژ تنظیم شده در درایو میباشد.
انواع اینورتر سه فاز به سه فاز در سایت آرمان بنیان اکسین با توانهای مختلف قرار داده شده که کافیست جهت نیاز به خرید یا اطلاع از قیمتهای آنها با ما ارتباط برقرار کنید.
تنظیمات اینورتر تک فاز به سه فاز
این درایوها یک راهحل مهندسی برای مکانهایی هستند که دسترسی به شبکه برق سه فاز وجود ندارد، مانند کارگاهها یا مصارف کشاورزی. این دستگاهها برق تک فاز 220V را به عنوان ورودی دریافت کرده و یک خروجی سه فاز 220V برای راهاندازی موتورهای سه فاز تولید میکنند. تنظیم صحیح این اینورترها نیازمند دقت به جزئیات فنی زیر است:
- نحوه اتصال موتور: الکتروموتور سه فاز الزاماً باید به صورت مثلث (Delta) سربندی شود. این کار باعث میشود هر کلاف سیمپیچ موتور ولتاژ 220V را دریافت کند که با ولتاژ خروجی اینورتر سازگار است. اتصال ستاره (Star) در این حالت منجر به افت شدید گشتاور و عملکرد نادرست موتور خواهد شد.
- تنظیم پارامتر ولتاژ موتور: این مهمترین و رایجترین اشتباه در راهاندازی است. پارامتر ولتاژ نامی موتور در منوی تنظیمات درایو باید روی 220V تنظیم شود، نه 380V. در غیر این صورت، الگوریتم V/f یا مدل برداری به درستی عمل نخواهد کرد.
- مفهوم کاهش توان نامی (Derating): از آنجایی که کل توان ورودی از طریق یک فاز تأمین میشود، فشار قابل توجهی بر روی ماژول یکسوساز ورودی اینورتر وارد میآید. برای تضمین پایداری و طول عمر دستگاه، انتخاب اینورتر با توانی بالاتر از توان موتور یک الزام است. به عنوان یک قاعده کلی، توان اینورتر باید حداقل 1.5 برابر توان موتور باشد (برای مثال، برای یک موتور 1.5kW، از یک اینورتر 2.2kW تک فاز استفاده شود).
شرکت آرمان بنیان اکسین در زمینه تامین و فروش انواع اینورتر کنترل دور موتور تک فاز ایرانی فعالیت دارد و تنها کافیست از طریق شماره درج شده در سایت با کارشناسان ما تماس بگیرید.
راهنمای جامع تنظیم پارامترهای اینورتر اکسین درایو (Oxin Drive)
در شرکت آرمان بنیان اکسین، ما مفتخریم که نسل جدیدی از درایوهای کنترل دور را تحت برند اکسین درایو (Oxin Drive) ارائه میدهیم. این محصولات، به ویژه سری برداری پیشرفته OD1000، با بهرهگیری از آخرین فناوریهای کنترلی، برای پاسخگویی به نیازهای دقیق و پیچیده صنعت امروز طراحی شدهاند. در ادامه، به تشریح ساختار پارامتری جامع این درایوها میپردازیم تا شما را در فرآیند راهاندازی و بهینهسازی یاری نماییم.
۱. پارامترهای اصلی تنظیم (گروه P0 / F0)
این گروه شامل تنظیمات بنیادی برای شروع کار اینورتر است.
| پارامتر | نام پارامتر | توضیحات دقیق |
|---|---|---|
| P0-01 | روش کنترل موتور | تعیین مد کنترل: 0: کنترل برداری بدون سنسور (SVC)؛ 1: کنترل برداری با سنسور (FVC)؛ 2: کنترل V/F (پیشفرض). |
| P0-02 | انتخاب فرمان راهاندازی | 0: پنل عملیاتی (کیپد)؛ 1: ترمینالهای خارجی؛ 2: ارتباط (MODBUS). |
| P0-03 | منبع فرمان فرکانس اصلی | تعیین منبع تنظیم سرعت از میان گزینههایی مانند تنظیم دیجیتال، ورودی آنالوگ (AI1/AI2)، پتانسیومتر پنل، ورودی پالس یا چند سرعته. |
| P0-10 | حداکثر فرکانس | بالاترین فرکانس خروجی مجاز که ۱۰۰٪ ورودی آنالوگ نسبت به آن مقیاسبندی میشود. |
| P0-17 / P0-18 | زمان شتاب/کاهش ۱ | زمان لازم برای رسیدن به فرکانس مرجع و توقف از آن. |
۲. پارامترهای موتور و خودآموزی (Auto tuning) (گروه P1 / F1)
برای کنترل برداری (SVC/FVC)، وارد کردن دقیق پارامترهای موتور از روی پلاک الزامی است.
- P1-01 تا P1-05: شامل توان، ولتاژ، جریان، فرکانس و سرعت نامی موتور.
پس از ورود این اطلاعات، پارامترهای داخلی موتور مانند مقاومت استاتور و روتور باید از طریق فرآیند اتوتیونینگ (P1-37) به دست آیند:
- مقدار ۱ (خودآموزی استاتیک): موتور نیازی به جدا شدن از بار ندارد.
- مقدار ۲ (خودآموزی کامل دینامیک): موتور باید از بار جدا شده و در حالت بیباری باشد.
۳. تنظیمات کنترل V/F (گروه P3 / F3)
- P3-00 (تنظیم منحنی V/f): امکان انتخاب منحنی خطی، مربعی (برای فن و پمپ) یا چند نقطهای را فراهم میکند.
- P3-01 (تقویت گشتاور): برای تقویت گشتاور در فرکانسهای پایین کاربرد دارد.
- P3-22 (ولتاژ عمل توقف اضافهولتاژ): در هنگام کاهش سرعت، اگر ولتاژ باس DC از این مقدار فراتر رود، اینورتر کاهش سرعت را متوقف میکند تا از بروز خطا جلوگیری کند.
۴. تنظیمات ورودی/خروجی (I/O) (گروه P4 / F4)
این گروه عملکرد ترمینالهای ورودی دیجیتال (X1 تا X6) و منحنیهای ورودی آنالوگ (AI1/AI2) را تعیین میکند.
- P4-00 تا P4-05: هر یک از این پارامترها میتوانند عملکردی مانند راهاندازی جلو/عقب، جوگ، ریست خطا یا فرمان چندسرعته را به یک ترمینال دیجیتال اختصاص دهند.
- P4-13 تا P4-16: این پارامترها یک رابطه خطی دو نقطهای بین ولتاژ ورودی آنالوگ و مقدار تنظیم شده (مثلاً فرکانس) تعریف میکنند.
۵. توابع کمکی و راهاندازی (گروه P6 / P8 / F6 / F8)
| پارامتر | نام پارامتر | توضیحات و کاربرد |
|---|---|---|
| P6-00 | روش راهاندازی | امکان انتخاب راهاندازی مستقیم، راهاندازی با ردیابی سرعت (برای موتور در حال چرخش) یا راهاندازی با پیشتحریک (برای بهبود پاسخ دینامیکی) را میدهد. |
| P6-10 | مد توقف | انتخاب بین توقف با کاهش سرعت (Decelerate to stop) یا توقف آزاد (Free parking). |
| P8-09 تا P8-11 | فرکانس پرش (Hop Frequency) | اینورتر را قادر میسازد تا از نقاط رزونانس مکانیکی بار اجتناب کند. |
۶. کنترلهای پیشرفته: PLC ساده، چندسرعته و PID
- PLC ساده (گروه PC): اینورتر از یک PLC داخلی با ۱۶ مرحله پشتیبانی میکند که میتوان زمان اجرا و شتاب/کاهش هر مرحله را تعریف کرد.
- کنترل PID فرآیند (گروه PA): درایو میتواند به عنوان یک کنترلر PID عمل کند. منبع مقدار هدف (Target) و فیدبک PID از طریق پارامترهای PA-00 و PA-02 تعیین میشود و گینهای کنترلر (Kp, Ti, Td) در پارامترهای بعدی تنظیم میگردند.
این ساختار پارامتری جامع، انعطافپذیری بالایی را برای پیکربندی دقیق اینورترهای اکسین درایو در کاربردهای مختلف فراهم میکند. برای کسب اطلاعات بیشتر، دریافت مشاوره فنی و خرید اینورتر کنترل دور موتور، میتوانید با کارشناسان ما در واحد فروش تماس حاصل فرمایید. تیم فنی شرکت آرمان بنیان اکسین آماده ارائه راهکارهای سفارشی برای نیازهای صنعتی شماست.
چرا تنظیمات کارخانهای اینورتر کافی نیست؟
تنظیمات کارخانه عمومی هستند و هرگز نمیتوانند با مشخصات فنی دقیق موتور الکتریکی و نوع بار متصل به آن هماهنگ باشند. پس حتما پس از نصب و راه اندازی درایو باید تنظیمات آن را متناسب با نیاز خود با توجه به توضیحات انجام دهید.
اهداف اصلی تنظیم پارامترها عبارتند از:
- کنترل دقیق سرعت و گشتاور: اینورتر با تنظیم فرکانس و ولتاژ خروجی، سرعت چرخش موتور را با دقت فوقالعادهای کنترل میکند.
- راهاندازی و توقف نرم: تنظیم زمان شتابگیری (Acceleration) و کاهش سرعت (Deceleration) برای جلوگیری از شوکهای مکانیکی و جریانهای هجومی ضروری است.
- حفاظت کامل از سیستم: تنظیم دقیق پارامترهای حفاظتی مانند اضافه جریان، اضافه ولتاژ و دمای بالا، از آسیب دیدن موتور و خود اینورتر جلوگیری میکند.
- بهینهسازی مصرف انرژی: با تنظیمات صحیح، موتور تنها به اندازه نیاز توان مصرف میکند که منجر به صرفهجویی چشمگیری در هزینههای برق میشود.
- الزام مدهای کنترلی پیشرفته: برای استفاده از مدهای پیشرفته مانند کنترل برداری (Vector Control)، معرفی دقیق پارامترهای موتور و انجام فرآیند Auto-Tuning یک الزام است. بدون این اطلاعات، اینورتر دید دقیقی از رفتار گشتاوری و جریان موتور نخواهد داشت.
نتیجهگیری
پیکربندی دقیق و مهندسیشده پارامترهای اینورتر، فراتر از یک راهاندازی ساده بوده و یک ضرورت برای دستیابی به حداکثر راندمان، پایداری فرآیند و افزایش طول عمر تجهیزات در سیستمهای اتوماسیون صنعتی است. فرآیندهای پیچیده و حساس نیازمند تحلیل دقیق و تجربه فنی بالایی هستند. در این راهنما از شرکت آرمان بنیان اکسین که تجربه بالایی در زمینه انجام پروژههای اتوماسیون صنعتی و نصب اینورتر دارد سعی کردیم یک راهنمای کامل را در اختیار شما قرار دهیم. در صورتی که نیاز به برقراری ارتباط جهت پروژه نصب اینورتر داشته باشید نیز کارشناسان ما شما را راهنمایی خواهند کرد.




1 دیدگاه
بسیار جامع و کامل بود ممنون از مقاله خوبتون